发行时间:0001.01.01
总页数:10
编辑:
综保科技
摘要:
A Multi-Agent Framework for Autonomous Underwater Vehicles for Mine Countermeasures with MOOS-IvP
Liam Paull1 , Sajad Saeedi1 , Mae Seto2 , Howard Li1
2
University of New Brunswick DRDC Mine and Harbour Defense Group
1
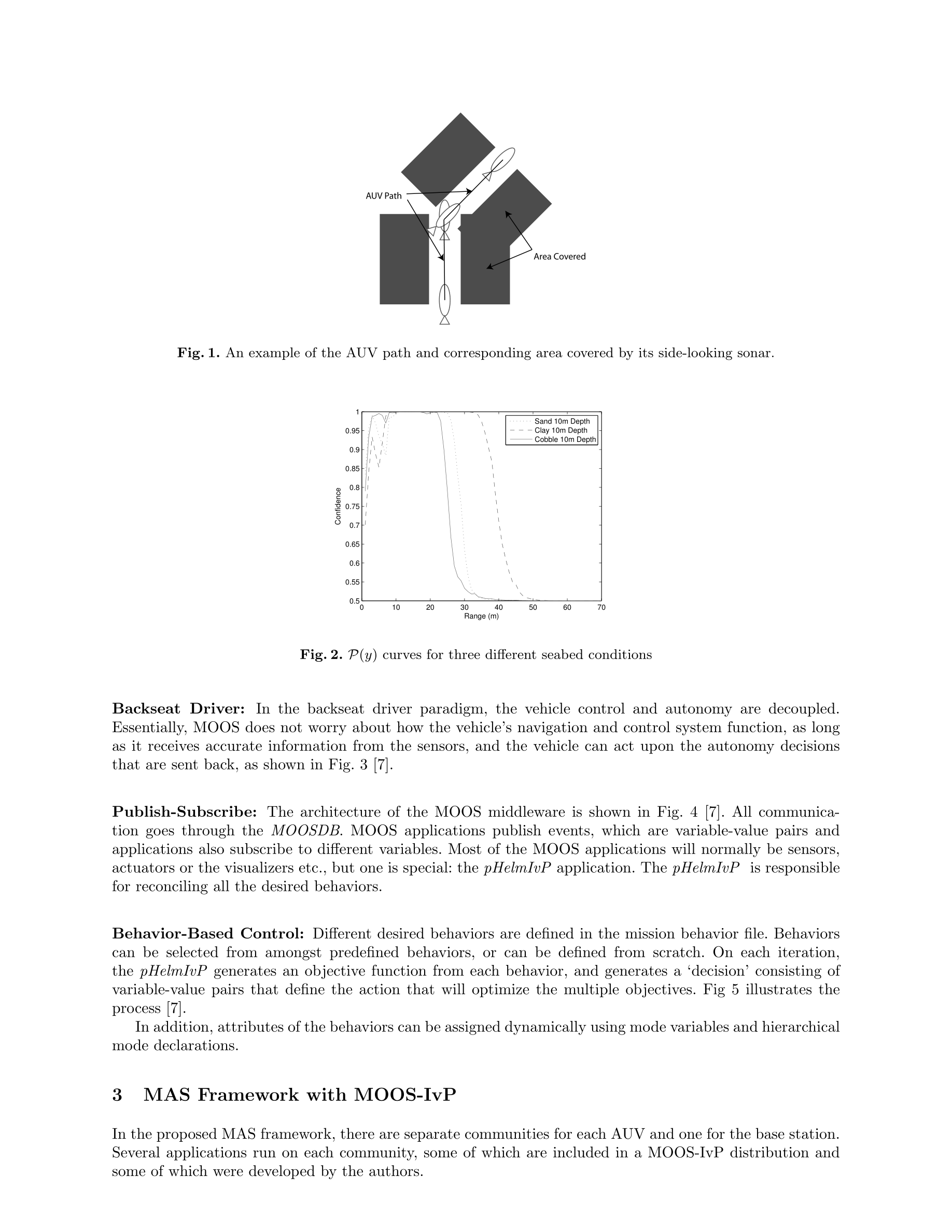
Abstract. In this research, a framework for building Autonomous Underwater Vehicle control algorithms that is based on the MOOS-IvP middleware is presented. The Sidescan Sonar Sensor (SSS) is commonly used to generate sonar images in which mine-like objects can be ident...



 普通账号
普通账号

