发行时间:0001.01.01
总页数:7
编辑:
综保科技
摘要:
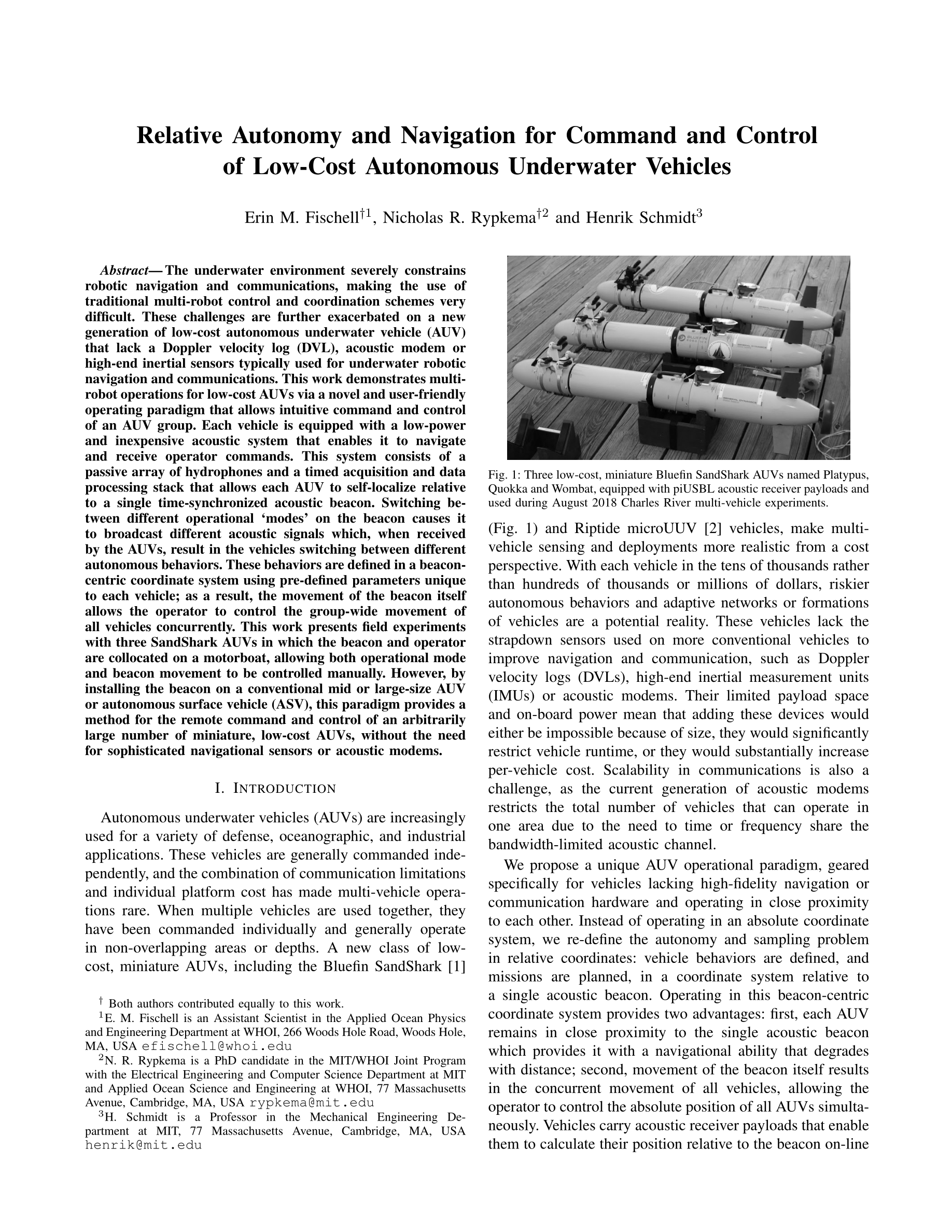
Relative Autonomy and Navigation for Command and Control of Low-Cost Autonomous Underwater Vehicles
Erin M. Fischell†1 , Nicholas R. Rypkema†2 and Henrik Schmidt3
Abstract— The underwater environment severely constrains robotic navigation and communications, making the use of traditional multi-robot control and coordination schemes very difficult. These challenges are further exacerbated on a new generation of low-cost autonomous underwater vehicle (AUV) that lack a Doppler velocity log (DVL), ...

 普通账号
普通账号

